2011年07月9日 17:15 | 分类:关于未来
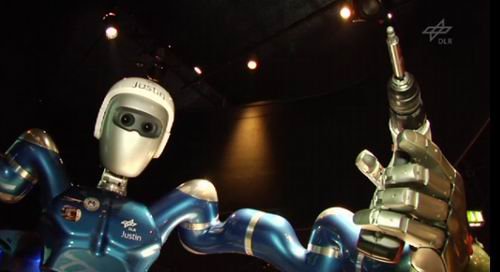
这款机器人具有轻重量手臂和四指手,是理想的太空实验平台
据美国物理组织网站报道,近日,德国航空中心最新研制一款移动机器人系统——“贾斯汀”,这款机器人具有轻重量手臂和四指手,是理想的太空实验平台。该移动机械平台可实现远程自治控制,独立的车轮可满足机器人处理任务时上半身的操作。装配在机器人身体上的传感器和相机使它能创建一个3D环境结构,确保机器人能够独立地工作。
“贾斯汀”机器人不久将派遣至国际空间站欧洲宇航局哥伦比亚实验室进行远程控制,它将与其它欧洲漫游机器人完成一些实验,这些漫游机器人将与遥控机器人在月球等行星上进行探索勘测。在两至三年内,这款太空实验机器人将在地面上模拟宇航员在国际空间站进行移动。
通过配备一个外骨骼结构——结合电子系统的机械手臂和手套,将使机器人手具备敏感触觉,更好地实现远程操控。为了使机器人和“思科网真(一种通过结合高清晰度视频、音频和交互式组件,在网络上创建一种独特的”面对面”体验的新型技术)”结合在太空任务的标配工具中,欧洲宇航局与国际空间站建立连接,可实现地面远程控制太空实验。