美设计师发明新款柔韧仿生手 可拿起任何物体
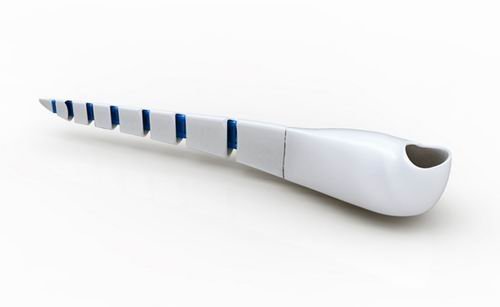
据国外媒体报道,目前,美国设计师凯莱恩–考(Kaylene Kau)最新设计的仿生手臂突破了当前仿生前手臂的传统设计,制造一种柔韧性仿生手臂,能够更容易有效地完成日常工作。

美国设计师凯莱恩-考(Kaylene Kau)最新设计的仿生手臂突破了当前仿生前手臂的传统设计

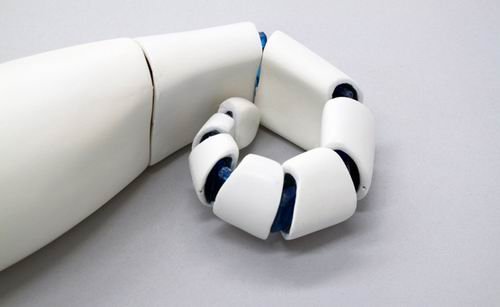
这一新款仿生手臂最大的特征是柔韧性设计,能拿起不同外形的物体,该仿生手臂还结合了马达转子和线缆,可帮助使用者在不同任务中控制盘卷力。
这一新款仿生手臂最大的特征是柔韧性设计,能拿起不同外形的物体,该仿生手臂还结合了马达转子和线缆,可帮助使用者在不同任务中控制盘卷力。
这一新款仿生手臂最大的特征是柔韧性设计,能拿起不同外形的物体,该仿生手臂还结合了马达转子和线缆,可帮助使用者在不同任务中控制盘卷力。
这一新款仿生手臂最大的特征是柔韧性设计,能拿起不同外形的物体,该仿生手臂还结合了马达转子和线缆,可帮助使用者在不同任务中控制盘卷力。基于简单有效的设计,该仿生手臂使残疾人群变得“独断专利”,可以在无需任何援助下完成每天的工作和任务。
网友评论:
2010-12-13 09:45:32
我勒个X,竟然还是触手系的,以后晚上估计看到外星人的报道会增多!
制成缩小版的,可让阳痿的人重新坚挺
您可收藏到:

















